
|
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997 |
 11-07-13, 06:30 AM
11-07-13, 06:30 AM
|
#76 | |
|
Ace of the deep .

Join Date: Jan 2006
Posts: 9,226
Downloads: 901
Uploads: 73
|
Quote:
|
|

|

|
|
11-07-13, 06:43 AM
|
#77 | |
|
Navy Seal
 Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:

|
|
|
|
|
|
11-07-13, 12:53 PM
|
#78 | ||
|
Watch
 Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Quote:
Some aspects of the KDB/Balcony are not clear to me, yet. Probably you can help me out here. As my understanding of the KDB is right now, I would model it just like the GHG, just without a deaf area at the bow and without a bearing dependent accuracy/max range degradation. But what about the deaf area at stern. It stems from the engine noise, right? The conning tower doesn't seem to be much of an obstacle to the KDB (for instance see http://www.u47.org/images/album/R07_6jul40.jpg , KDB sensor is visible on the very bottom left of the picture). So would it be possible to listen to contacts at stern, if you shut down the engines while being submerged? Another source (which I cannot find again now On to the Balcony apparatus: Quote:
The german wikipedia article on the GHG (http://de.wikipedia.org/wiki/Gruppenhorchger%C3%A4t) also states, that you could use the balcony apparatus while the sub was surfaced, because the hydrophones were mounted at the keel and the body of the sub shielded them from surface noise. Unfortunately the wikipedia article provides no source for this statement and I couldn't confirm it anywhere else yet. Also, the UBoot_Sensors.sim file of R.E.M_by_Xrundel_TheBeast_1.2 - no hyd on surface - NewUIs-IRAI compatible (gap, your work?) seems to require the boat to be submerged, even with a balcony apparatus. |
||
|
|
|
|
11-07-13, 04:31 PM
|
#79 | |||
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
Quote:
- the KDB had a much shorter range than the GHG, but it had a better bearing accuracy, and had no deaf angles. From that, I desume that it could have been more sensitive to short wavelenghts and lesser sensitive to long wavelenghts than the GHG, but this is just my speculation. - due to its short range, the KDB wasn't used as unique listening apparatus, but always coupled with the GHG. This is currently not modelled in game (KDB's specs are therefore unrealistically boosted in game) but there is a possible method for making both sensors to be associated with the KDB upgrade. If you want, I can send you some files modded to the above purpose. I am not fully sure that my method would work, but imo it is worth a test. - due to their relative vicinity, running engines should have deteriorated hydrophone sesitivity and accuracy at any angle, maybe with a slight further decrease in performamnce when listening astern. Balcon Gerat's sonic filters could have partly obviated the problem, but even so silent running or full stop would have been an important listening prerequisite. - both GHG's and balcon gerat's sensors were located along or near boat's keel and, theoretically, they could have been used on surface, though the vicinity of wave-generated noise, would have deteriorated their performance sensibly. Again, Balcon Gerat's improved electronics could have made surface listening a bit better. On the contrary, KDB's sensors stickied out of the water while the boat was surface, thus making their usage impossible. NOTE: the SensorHeight parameter (SensorData controller), already takes into account sensors' position along the boat profile. Therefore, setting KDB's minimum heigh lower than GHG's makes little sense imo. - I remember having read on the forum that the Balkon Gerat had a deaf spot at high elevation angles (thus making its use pointless against targets located directly on top of the boat). IIRC, this fact is already modelled in game through stock and REM settings. I couldn't find a conformation to the above statement elsewhere on the web, but it makes sense anyway as, being located below the keel, BalkonGerat's sensors were a bit lower than GHG's sensors, and much lower than KDB one. This would be yet another argument in favour of the assumption that the Balkon Gerat wasn't as affected as GHG and KDB by surface noises. Quote:
In my opinion you should create a new set of sensordata controller settings, suiting your mod better. If you wanted to increase compatibility with other mods, you would need to clone the existing hydrophones. Should you decide to follow my suggestion, I will be glad to help you on the clonig task
|
|||
|
|
|
|
11-09-13, 09:02 PM
|
#80 |
|
Ace of the deep .
Join Date: Jan 2006
Posts: 9,226
Downloads: 901
Uploads: 73
|
Any way to script Mr know it all to announce depth charges in the water ? It should be Mr almost know it all

|
|
|
|
|
11-10-13, 06:52 AM
|
#81 | |
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:

|
|
|
|
|
|
11-12-13, 04:37 AM
|
#82 | ||||
|
Watch
Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Quote:
Quote:
Quote:
Quote:
- GHG: Maxrange 40000, MinDepth 6m, Bearingranges: 10-150, 210-350 - KDB: Maxrange 30000 (or whatever shorter range means), MinDepth 10m (or deeper? the kdb sensor should be well below the surface), Bearingranges: 0-360 - BG: Maxrange 50000, Mindepth 0m, Bearingranges: 0-150, 210-360 The rest will be done by scripting: Consider the sensor controllers as a first set of criteria, whether we can hear a contact or not, and the scripts act as a secondary filter, after the contact has been detected by the sensor controller. For instance, this is GHG's effectiveness by our sub's depth (x-axis: depth in meter, y-axis: GHG-effectiveness in percent): 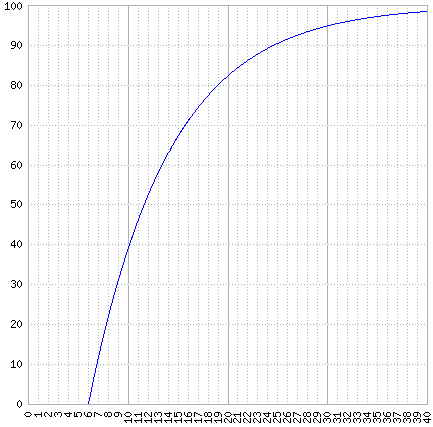 So at 6m it starts working, at 7m we can already hear (very loud) contacts in a distance of 4km (10% of 40km set in sensor controller), and at 30m we reach an effectiveness of 95%, i.e. we can hear very loud contacts in a distance of 38km. There are other depth modifiers for KDB, BG, and gradual modifiers that take the contact's speed into account (enlarging the detection range for loud contacts, shrinking it for more silent contacts), as well the noise generated by our own engines: We cannot hear anything, if we are running on diesels (incl. snorkeling), it's just too loud. On electric engines, silent running doesn't interfere much with the hydrophone's effectiveness, but moving at flank speed shrinks the detection range to just a few hundred meters. So: It'd be great, if you could help me mod the UBoot_Sensors.sim. The goal is to have the above simple hydrophone sensors, but keep other changes/fixes, that are applied by REM, IRAI etc. |
||||
|
|
|
|
11-12-13, 05:18 PM
|
#83 |
|
Swabbie
 Join Date: Mar 2010
Posts: 8
Downloads: 120
Uploads: 0
|
Seems like the 1.1 version manually replaced sounds over to German? Tried preventing that by uninstalling mod, removing the sounds folder from the mod, reinstalling only to end up with no sonarman sounds. Nowhere near as interesting as the technical details in the posts preceding mine - but hopefully an easy fix.
|
|
|
|
|
11-12-13, 07:10 PM
|
#84 | |||||||||||||||||
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
 Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
Quote:
 Quote:
Quote:
Sonar reference and implementation details |
|||||||||||||||||
|
|
|
|
11-14-13, 12:23 PM
|
#85 |
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
I have created an on-line chart resuming all the information we have gathered so far:
https://docs.google.com/spreadsheet/...lE&usp=sharing I have left the document open for editing by anyone: feel free to correct any mistake I might have made, or to add information in case you find any new source. You will notice that there are several discrepancies between different sources, especially regarding maximum ranges, maximum allowed speeds during hydrophone listening, and deaf angles. Talking about the latter, there seem to be some confusion between totally deaf arcs, and arcs at which sound detection would have been harder and/or lesser accurate but still possible, for KDB and Balkon apparatus. This might partly depend on the fact that "astern handicaps" could have varied greatly, depending on the propulsion adopted during underwater listening. The above statement is especially true if referred to the KDB which should have provided correct bearings at any angle, provided that U-boat propulsion was switched off during its use. I will let you to draw the conclusions; at this moment I have just a few general suggestions:
|
|
|
|
|
11-17-13, 07:43 AM
|
#86 |
|
Navy Seal
Join Date: May 2010
Location: Србија
Posts: 6,078
Downloads: 581
Uploads: 13




|
I must express my gratitude one more time, this mod is such a large improvement !
I've got few questions though... Is there any way to prevent this?  It can be very annoying when large conwoy is in site... Also it would be really awesome if you could make some changes for sonar too...Current implementation isn't so realistic at all...
__________________
Best regards... Vecko  The Wolves of Steel v2.2.25_SH5 Expansion Pack_Full The Wolves of Steel v2.2.xx to v2.2.25 - Update  PDF Install Instructions How to report an issue  If You wish to support my work... |
|
|
|
|
11-18-13, 09:28 AM
|
#87 | |
|
Grey Wolf
 Join Date: Sep 2006
Location: NY
Posts: 994
Downloads: 1078
Uploads: 6
|
Quote:
 Will there be an English version for the sound files someday?
__________________
JSGME help links and common error solutions |
|
|
|
|
|
12-14-13, 08:03 AM
|
#88 |
|
Navy Seal
Join Date: May 2010
Location: Србија
Posts: 6,078
Downloads: 581
Uploads: 13
|
Bump! Tscharlii, please don't give up on this mod, it has so much potential...
__________________
Best regards... Vecko The Wolves of Steel v2.2.25_SH5 Expansion Pack_Full The Wolves of Steel v2.2.xx to v2.2.25 - Update PDF Install Instructions How to report an issue If You wish to support my work... |
|
|
|
|
12-14-13, 08:10 AM
|
#89 | |
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
 undersigned |
|
|
|
|
|
01-06-14, 06:48 PM
|
#90 |
|
Bilge Rat
 Join Date: Dec 2013
Posts: 1
Downloads: 75
Uploads: 0
|
hello masters of mod!
and special greetings to tscharlii for this great modification (the sonarguy is now my best friend below deck, i call him charlie.  ) )^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ ^^^^^^^ is there a posibility that the messages of the sonarguy called out by heard contacts (in german: horchkontakt) that are shown in the message-box can be changed to the german terms? ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ ^^^^^^^^^^^^^^^ i'm german and i like to play the game in german language. i modificated the ui mod of the dark wraith to german by changing the menu.txt file (easy one if there is any advice how it could changed would be very welcome! wohl auf! "Die Südfrüchte runter vom Kartentisch. Auf Bananen kann ich nicht navigieren." |
|
|
|
 |
|
|





 Linear Mode
Linear Mode

