
|
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997 |
 05-07-09, 10:19 AM
05-07-09, 10:19 AM
|
#1 |
|
Nub
 Join Date: May 2009
Posts: 4
Downloads: 26
Uploads: 0
|
I was thinking about how to do this simply yesterday and I think I've developed a method for mounting an attack - or at the very least generating accurate heading/speed/range data for a target. I had some success with it last night tracking a target in a custom mission but didn't have time to launch a fish or try it out in the wild.
I apologize if much of this is old news - I can't be the first one to have tried something like this but my searches didn't find much. I'm probably reinventing the wheel here but it's been a fun challenge anyway. I'll explain what I've done here on pencil and paper and try to explain the issues I'm having with it as well as I get to them. The example assumes a fairly close range target just because I've already done the time/distance conversions for it on this scale. Some of the measurements will be in metric as that's the way I worked it out. This will probably be clearer if you follow along on paper. This is a long post but it's not complicated. I've summarized the steps just below. I just worked it out with a pen and ruler and calculator for the distance conversions. A summary of the process: -take 3 timed measurements -determine target course -plot future timed bearings -move and take new timed bearing -determine actual speed and range The first two steps above would probably have to be repeated a few times to move your boat into a suitable attack position. PART I First, we start with the boat, presumably stationary and submerged, and a passive sonar contact. We mark the bearing and draw a line from our boat on that bearing. We start our stopwatch and plot a second bearing 3 minutes later. Why three minutes? At the ranges we're talking about (medium to short-ish - 5 km and under) it should usually give us a good separation on our headings, if our target isn't heading right for us or directly away. For longer range targets, you'd want to use more time, it's a call you'd have to make in the moment depending on the quality of the data you're getting. Three minutes after our second timed bearing, we take a third bearing on our target. We'll want to keep the clock running for the duration of the attack (probably a good reason to have a real-life stopwatch if the ticking of the one in game drives you crazy). We now have three timed bearings on our target. PART II What can we learn from these bearings? I think I've found a few things, provided we make a few assumptions: 1. Our target is moving at a constant speed This means that he covered the same amount of distance between bearings one and two, and between bearings two and three. 2. Our target is moving in a straight line We can already tell whether the target is moving towards us or away from us - if the distance or angle between the first two bearings is greater than the distance between the second two bearings, he's moving away from us - as the target grows more distant, his relative bearing to us will change more slowly if his speed remains the same. Likewise, if the distance or angle between the second pair of bearings is greater than the first pair, the target is closing with us - his relative bearing will change more quickly the close he gets. If the angles and distance between the two sets of bearings (one and two, and two and three) are the same, he is passing directly past us but will soon be moving away. I've read that you can use the rate of bearing change to calculate either speed or range or both. I don't know how to do that. However, we can get a heading. This is the part that's easy on paper and more difficult with the in-game interface. Our target has traveled the same distance between bearings one and two, and bearings two and three. So, we're going to throw our first estimate out there and use that get his estimated distance (for his estimated speed) and his actual heading. PART III We'll estimate a speed of 11 knots. This translates to 1017.72 metres every 3 minutes, as per our timed measurements above. With the pen and paper, I've been working in a scale where 1cm = 500m. With this example, I'm assuming that the bearings we've taken will have a total spread of about 45 degrees, which would give an 11 knot range of about 3km. Initial contact is likely to be much more distant and, as mentioned previously, require longer duration timed bearings. At that range, however, good estimates will be good, enough, as we'll just want to close on the target, at that point we don't need data good enough to shoot with. So, pencil and ruler time. This is the biggest problem with this method as it stands - there isn't an easy way to do this in game and I can't express it in math. Yet, it's really simple just by eyeballing it. Taking our ruler, we need to find the 4cm long line - this is the 2035 metres the target traversed over the course of our timed bearings, if his speed was 11 knots - that fits on our three bearing lines. All 3 points must be on a bearing line, and there is, as far as I can tell, only one position where the 0cm, 2cm, and 4cm marks all fit perfectly on the bearing lines we've drawn. To make this as clear as possible - with our ruler, 0 cm is where the target was when we shot our first bearing. 2 cm is where he was when we shot our second. 4 cm is where he was when we took our third. His path is right there on the ruler. We have to fit those three points onto the bearings we took. That one spot where the line fits gives us the target's course, as well as his estimated range given his estimated 11 knot speed. There's got to be some kind of way of using math/trig to find that point where the line fits, but I don't know it and I haven't been able to work it out. As well, the tools for doing so in the game are clumsy and inaccurate. The best option seems to be taking the two angles to the bearings from our boat and the measurement from game data, plotting them on paper, and using your ruler to find the course, then sticking it back in the game. Some of the other measurements would be easier on paper but can be done in game. That's all I have time to post right now, I'll come back to this in a bit. So far, we've developed our target's course. Next, I'll look at determing range and speed. Sorry this is so long, if this idea turns out to have any merit, I'll do up some diagrams to make it clearer. |

|

|
|
05-07-09, 10:25 AM
|
#2 |
|
Ace of the Deep
 Join Date: Jul 2005
Location: Germany's oldest city alive
Posts: 1,066
Downloads: 57
Uploads: 0
|
Hm, would this work together with the prop count mod ? If you could estimate the target speed by passive sonar, this should help much in usage of your method.
Interesting approach, though. |
|
|
|
|
05-07-09, 10:57 AM
|
#3 |
|
Nub
Join Date: May 2009
Posts: 4
Downloads: 26
Uploads: 0
|
I don't know anything about the prop count mod, I'll have to look into that.
To continue - so far, we've used three timed bearings, a ruler and an estimated speed of 11 knots to determine our target's estimated range, and most importantly, his actual heading. PART IV Once we have our target's heading, we're going to do one of two things - if he is at long range or receding, we'll want to use his course to either close with him or plot a surface end-around to get in front of him. If we deem that he is likely close enough to attack - and with the amount of error I think is possible in this method, we'll want him pretty close - we'll plot a parallel course at our best speed. We want to make sure that we're well ahead of our target as he's likely faster than us (we're estimating that he is, certainly) and we're going to need some time to move and collect the last of our data. First, we also have to enter some more data here. Along the target's course, we're going to plot his expected position at 3 minute intervals. Remember that we left the clock running after our initial three bearings, and this is why. We're going to plot where he's going to be in three minutes (at 11 knots, that's 1017.72 metres further along his heading than the last timed bearing we took from him). Then three minutes after that, another 1017.72 metres. Keep doing this until you've marked his expected positions for the next 12 minutes or so. I suppose you could pick whatever time you want, work out the distance he'll have traveled, and plot it. I just use the three minute intervals because I already have the distance worked out. I really don't know what amount of time would be appropriate here. The longer you go, the more error that will probably creep in. We'll say that we're going to get our target's real speed and range in 12 minutes. PART V In a minute. I hope I'm being clear here, I feel like I'm writing a book and I could explain this to anybody in 2 minutes face to face. :P |
|
|
|
|
05-07-09, 10:58 AM
|
#4 |
|
Navy Seal
 Join Date: Mar 2007
Location: DeLand, FL
Posts: 8,900
Downloads: 135
Uploads: 52




|
Hmmm....makes good sense. The prop count mod won't work at all because the prop is not continuously variable through the range of target speeds. There are only a few recordings of prop sounds and the game slides whatever one it wants to in there loosely based on target speed. So for a pretty wide range of speeds the prop count will be the same. The most you might determine is fast, medium or slow. That's not good enough. Hope they get that worked out in SH5.
But we didn't have any charts to relate rev count to target speed in WWII. The reason for that is that there was no database of Japanese shipping that was anywhere near comprehensive. It was a far cry from now, where the submarine has a database of just about anything bigger than a rowboat anywhere in the world and the sonar id's the target by name and gives pretty precise speed based on that id plus accurate rev/speed data for that individual target. We had data of questionable accuracy on a few warships and next to nothing on the merchies. So the knowledge just wasn't there to determine target speed by counting prop revolutions. That's movie stuff. Let's not make the Das Boot error in the Pacific. As much as is possible, let's recreate reality, not movies. Sonar WOULD have a valid function during the creation of the bearing rate table and chart, though. One of the assumptions, that the target maintains the same speed during the observation, can be verified by the sonar operator, and it is his job to announce any changes in target revs during the process. If he announces "target speeding up" you have to start the whole bearing rate analysis over again. I guess you can guess  that real submarines did this. And you know the game devs chose not to integrate bearing rate tables and charts into the game (add to the list of SH5 bells and whistles!). For details go to the Submarine Torpedo Fire Control Manual, page 5-43. It has the precise formula you need and it won't help! that real submarines did this. And you know the game devs chose not to integrate bearing rate tables and charts into the game (add to the list of SH5 bells and whistles!). For details go to the Submarine Torpedo Fire Control Manual, page 5-43. It has the precise formula you need and it won't help! 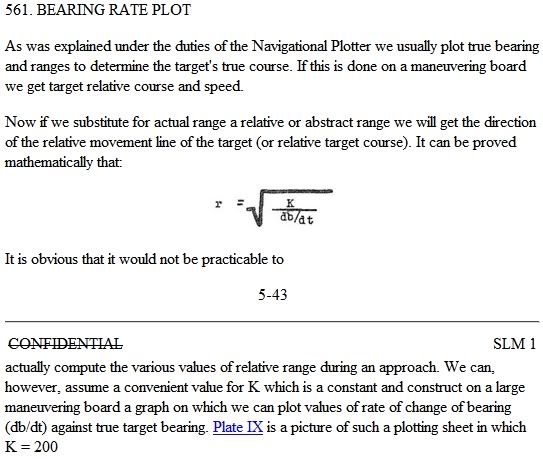 Your way is MUCH quicker. Even better would be a reproduction of the authentic methods they used in the war. You don't read much about it because it wasn't done very much.
__________________
Sub Skipper's Bag of Tricks, Slightly Subnuclear Mk 14 & Cutie, Slightly Subnuclear Deck Gun, EZPlot 2.0, TMOPlot, TMOKeys, SH4CMS Last edited by Rockin Robbins; 05-07-09 at 11:20 AM. |
|
|
|
|
05-07-09, 10:59 AM
|
#5 |
|
Sea Lord
Join Date: Jun 2006
Location: Somewhere else now
Posts: 1,738
Downloads: 825
Uploads: 4
|
 No repeat the same thing when you have escorts 'hovering' on your tail, and you can only pop you scope up for a second or two, not to mention getting into position after avoiding the escorts. The only passive sonar method that I work with is to go deep and then pop up in the middle of the convoy - there's no time for all the frills, and the only thing you can do is lock onto a ship and count revs on the way up. When at scope depth ID the ship, and determine speed and attack angle. Punch this all into the TDC and fire... All within about 3 to 5 minutes. Timing is critical and it's a very tense few minutes Then dive again to avoid escorts. I'm busy with a video tutorial of this. |
|
|
|
|
05-07-09, 11:14 AM
|
#6 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
You can do it with the TMA tool in MoBo... at least you can ditch the pencil & paper. I didn't read all of your post in detail; sounds like you're talking about the stuff I mention in the MoBo manual under TMA and Advanced TMA (the Adv TMA section relates to plotting future expected bearings to triangulate on target position). You should probably search on "TMA" or Target Motion Analysis, to find hits on this forum.
 You can pull game screens in to draw on too... 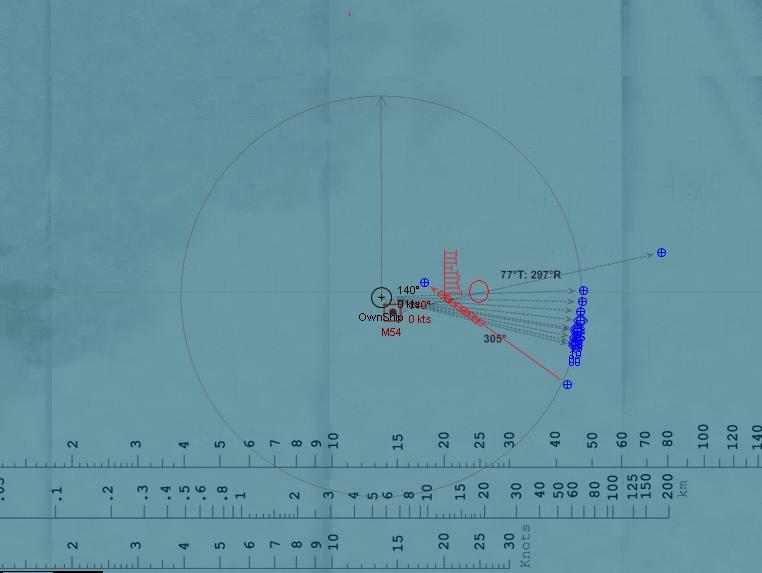
__________________

|
|
|
|
|
05-07-09, 11:30 AM
|
#7 |
|
Navy Seal
Join Date: Mar 2007
Location: DeLand, FL
Posts: 8,900
Downloads: 135
Uploads: 52
|
And Aaronblood's MoBo program is performing a perfect bearing rate analysis as done on a WWII sub's plotting table and in the above referenced manual. It mathematically does what you do with your analog ruler. MoBo is a free download from right here at Subsim. I gave you a link to the whole forum dedicated to MoBo. You can easily find the download link and lots of help in using Aaronblood's indispensible program there.
Hey Aaronblood! You gotta learn to toot your own horn! I'm happy to help, but I can't be everywhere MoBo needs to be promoted. MoBo: it's what's for dinner. OOOOOOOOO! This is a relative course you're plotting with the bearing rate plot on the maneuvering board. Don't forget to convert relative course to true course before you start filling the water with torpedoes!
__________________
Sub Skipper's Bag of Tricks, Slightly Subnuclear Mk 14 & Cutie, Slightly Subnuclear Deck Gun, EZPlot 2.0, TMOPlot, TMOKeys, SH4CMS |
|
|
|
|
05-07-09, 11:58 AM
|
#8 |
|
Lucky Jack
 
Join Date: Jun 2005
Location: In a 1954 Buick.
Posts: 28,266
Downloads: 90
Uploads: 0
|
Meh, just call in air support and call it a day.
__________________
You're painfully alive in a drugged and dying culture. ― Richard Yates, Revolutionary Road |
|
|
|
|
05-07-09, 12:10 PM
|
#9 |
|
Nub
Join Date: May 2009
Posts: 4
Downloads: 26
Uploads: 0
|
So now we know which way our guy is headed, and where we expect him to be in 12 minutes. We're going to spend that 12 minutes, if we are going for a shot, running a parallel course at our best speed. The more separation we can get from our initial position, the more accurate our speed and range data will be - however, the longer we wait, the more magnified any course errors we've made will become.
PART V While we're under way, we're going to plot a line on our chart. It stretches from our initial position to -and through - the expected target position at 12 minutes. At 12 minutes, we take another bearing to target. It is very, very unlikely that he will be where we thought he would. This is okay, the 11 knot speed was always just an estimate. Now we have his actual range and speed. Let's draw a line along our new bearing to target, the 12 minute bearing. At some point, it is going to intersect with the line we drew in the first paragraph of PART V above, his expected position. This intersection between his expected and actual bearing will be his actual position. We can now do two things - estimate his speed with a good degree of accuracy, or determine it exactly. For the estimate, we use the range between the 11 knot expected track, and our own parallel track. If he is halfway between the two, his speed will be about 5.5 knots. Closer to us means he's going slower. Closer to the estimated track means he's going faster. Outside of the estimated 11 knot track means he's going even faster than our 11 knot estimate. Calculating the speed exactly is easy. We measure the distance, along the same heading as the 11 knot path but now starting from the expected/actual intersection, back to the first bearing we took of his boat, which would have been 18 minutes prior (12 minutes + 6 minutes for the first set of timed bearings). You could calculate his speed from his actual position to any of the actual bearings, just match the times. I'm using the first because I believe the data will be more accurate with the larger sample. For example - range between his expected/actual intersection, and the first timed bearing, is 4500m. He covered 4500m in 18 minutes, for a speed of 250 metres per minute. Times 60, that's 15 kilometres/hour. Multiplying by 0.54 gives a conversion of 8.1 knots. So, now we have our target's speed, position, and heading. From here we should be able to move into position, swing our bow around to face the target, and plot a good solution for a Dick O'Kane type attack, although like I said initially, I think repeating the initial timed bearings a few times would be valuable to refine our data. I won't repeat the details of setting up the O'Kane shot here as it's been covered elsewhere and I think most are comfortable at this point with that technique. Due to our slow speed submerged and the fact that this technique takes a significant amount of time to develop, it is clearly not applicable to all situations. Still, I think there's something here and in some situations it could be valuable. Last edited by RingoCalamity; 05-07-09 at 12:16 PM. Reason: Edited for clarity (as if this has any). |
|
|
|
|
05-07-09, 03:17 PM
|
#10 | |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
Quote:
__________________
|
|
|
|
|
|
05-07-09, 03:29 PM
|
#11 | |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
Quote:
__________________
|
|
|
|
|
|
05-07-09, 04:17 PM
|
#12 |
|
Navy Seal
Join Date: Mar 2007
Location: DeLand, FL
Posts: 8,900
Downloads: 135
Uploads: 52
|
I love it when they trot out the mind bender mondo-formula (this one really isn't complicated enough to qualify) and then begin the next sentence with "It is obvious..."
__________________
Sub Skipper's Bag of Tricks, Slightly Subnuclear Mk 14 & Cutie, Slightly Subnuclear Deck Gun, EZPlot 2.0, TMOPlot, TMOKeys, SH4CMS |
|
|
|
|
05-07-09, 04:32 PM
|
#13 | |
|
Silent Hunter
  Join Date: Dec 2004
Location: AN9771
Posts: 4,904
Downloads: 304
Uploads: 0
|
Quote:
 http://www.subsim.com/radioroom/showthread.php?t=147719 My tool determines the AOB at the 1st bearing. And so a course is fixed as the relative bearing can be converted to a true-bearing. But range and speed isn't directly possible with it. It can be determined in the way you figured it out yourself allready, by sprinting away from your listening position and take a 4th bearing that crosses an 'imaginary/projected 4th'. (it is very similar to this: http://forums.ubi.com/eve/forums/a/t...535#7821098535 or the same here in Subsim.com: http://www.subsim.com/radioroom/showthread.php?t=110619 ) Personally I view this method more appropriate for situations beyond visual range, or in horrendous fog conditions, and no radar capability. Like doing a random hydrophone check. In ranges of around 5km you might aswel stick a periscope up for a short peek on the bow. Or your lookouts must have been asleep on the job. If it is the case in which you find a longrange hydrophone contact, it is most likely going to take alot more than 3 minutes for the 1st 2 bearings, and ofcourse appropriately longer for the next bearings. Infact, the longer you allow this time interval, the more the bearing differences diverge and the more accurate the resulting AOB becomes. You can see this on the tool in upper degree range where the marks are closer together. At the lower degree-range (5-10) a 0.5 degrees measuring fault on the bearings makes the AOB fairly crude. I suggest initially taking the shortest possible time interval to allow 6 to 7 degrees of drift and match it up with the bearing B3-B1 that follows after the 2nd interval. From that rough course judge how long it takes until the AOB is 90 degrees, aka closest point of approach. Then redo the process with a longer interval halve of that time. If I may propose another reason for allowing more time. Consider that boredom was the most performed activity onboard subs thosedays (perhaps still is). If you finally found a contact in that huge empty ocean. Would you like to rush things to get it over within an hour, and get back to your previous 'activity'? Or would you like to dedicate your time and attention to it and do it well? For the rest of the day! (with time compression ofcourse) Speed and range will be most accurate if you sprint away (as fast as possible, surface if you can) perpendicular to the 3rd bearing. This means you don't get too close and be detected (unless you allready have been) when that really was at the closest point of approach, or 90 AOB. And you'll have the best data to perform a propper intercept and end-around. Most likely you are allready in a forward position as you begin the intercept. There is no need to sprint just as long as the time intervals for the first 3 bearings. As long as the 4th 'imaginary' bearing is projected forward in the right proportion you are doing good. But long intervals during the 3 bearings does help accuracy here too. Aside from my tool there is also a graphical method, and quite different from Mittelwaechters tutorial linked above. http://files.filefront.com/bearingso.../fileinfo.html The method explained in the pdf is really based on situations with ownship moving with significant speed (also consider the time intervals used for it). I don't think slow submerged speeds are good for this. And surface-sprint-listen-hops are hard to do with steady average speed. Pick steps 2 through 6 to replace your eyeballing in Part 2 of your own methods (if I may be so bold
__________________
My site downloads: https://ricojansen.nl/downloads Last edited by Pisces; 05-07-09 at 05:33 PM. |
|
|
|
|
|
05-07-09, 05:14 PM
|
#14 | |
|
Silent Hunter
Join Date: Dec 2004
Location: AN9771
Posts: 4,904
Downloads: 304
Uploads: 0
|
Quote:
http://files.filefront.com/NOE+Beari.../fileinfo.html On page 4 of it are the formulas that my tool was based on. Pretty simple 
__________________
My site downloads: https://ricojansen.nl/downloads |
|
|
|
|
|
05-07-09, 05:25 PM
|
#15 | |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
Quote:
Take a look at this thread: TMA by Least Square Method
__________________
|
|
|
|
|
 |
|
|






 Linear Mode
Linear Mode

