
|
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997 |
|
|
 07-25-09, 09:45 AM
07-25-09, 09:45 AM
|
#1 |
|
Helmsman
 Join Date: May 2009
Location: Germany
Posts: 102
Downloads: 174
Uploads: 4
|
Hi all!
first of all, thanks Aaron for creating such a great app! I have the following question: When I try to plot targets passively by TMA while moving, I came across some theoretical problems that don't occur when plotting targets while stationary. Is there a way to avoid this? I have attaches some pictures to illustrate: fig.1 we see the real contact (above) travelling 90°T with 7 kts. Below is a "fine" TMA, but unfortunately, I have chosen the wrong two points. Of course, I could have been lucky and have chosen the right distance to begin with, but let's assume this is my TMA. 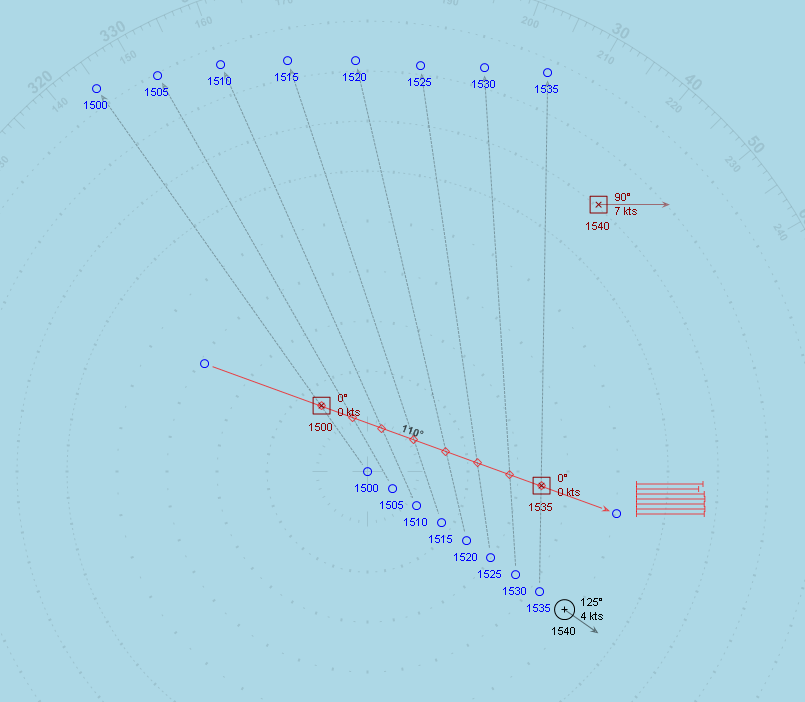 fig. 2 I have connected the two preliminary contacts. TSD shows an unlikely speed. 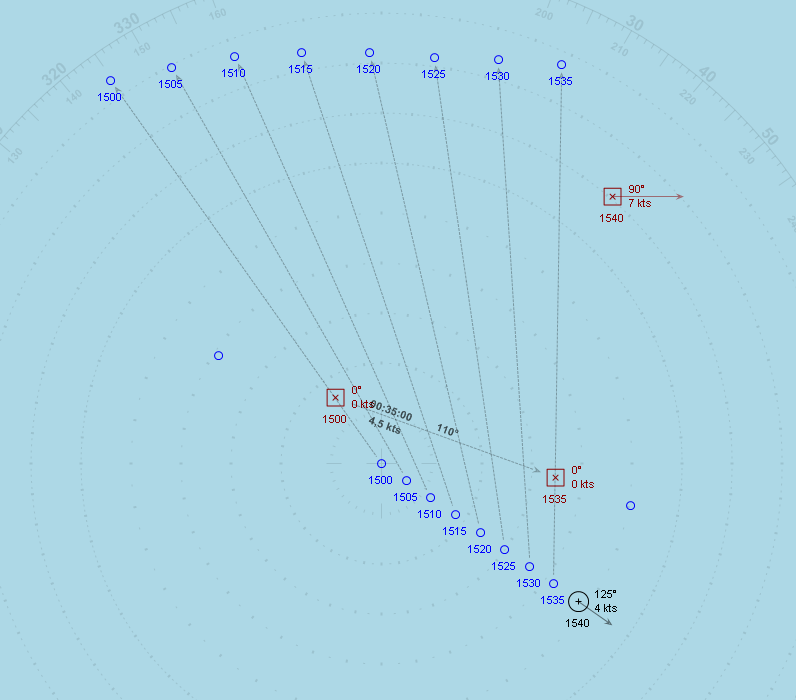 fig.3 So I adjust the scale, unfortunately I get a fine looking, but wrong analysis  Is there a way to avoid this? -Maybe by making a preliminary TMA while stationary, then start moving, maybe even triangulate (by plotting future bearings)? Thanks again and maybe you have a solution! Last edited by XLjedi; 07-29-09 at 10:20 PM. Reason: Changed file host to preserve images for future reference |

|
|
07-25-09, 09:58 PM
|
#2 |
|
Ace of the Deep
 Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
That's a good question.
 What you've plotted is a nice DRT TMA track. I haven't had the time to add a MoBo tool that will give a solution like that (even though Dr. Sid has given me the code for it.) I guess I should try to incorporate Dr. Sid's least squares solution tool...  The TMA tool I have in MoBo presently is for working on a maneuvering board assuming you understand the concepts of relative motion. The plotting is actually a little easier (you only need half the nodes you plotted). Here's your DRT tracking data: (true motion) 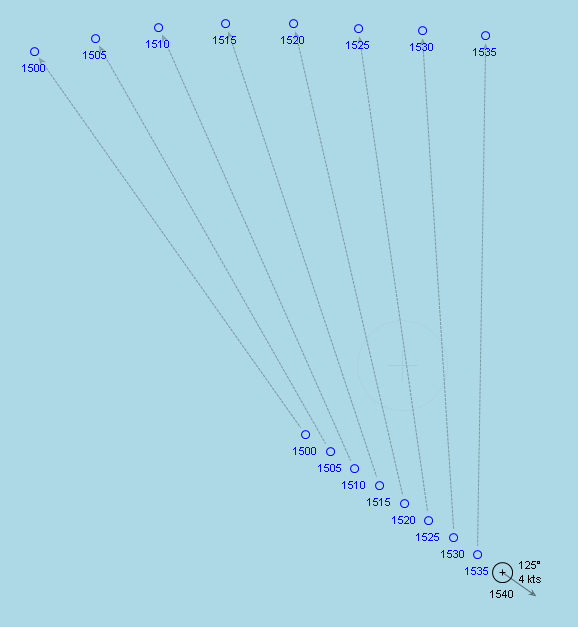 I'm interested in knowing the relative bearings for each observation: 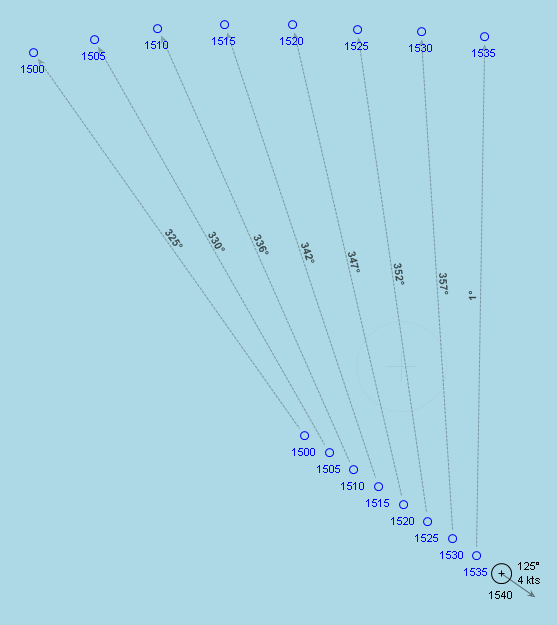 Now here's how you plot it on a maneuvering board (relative motion): 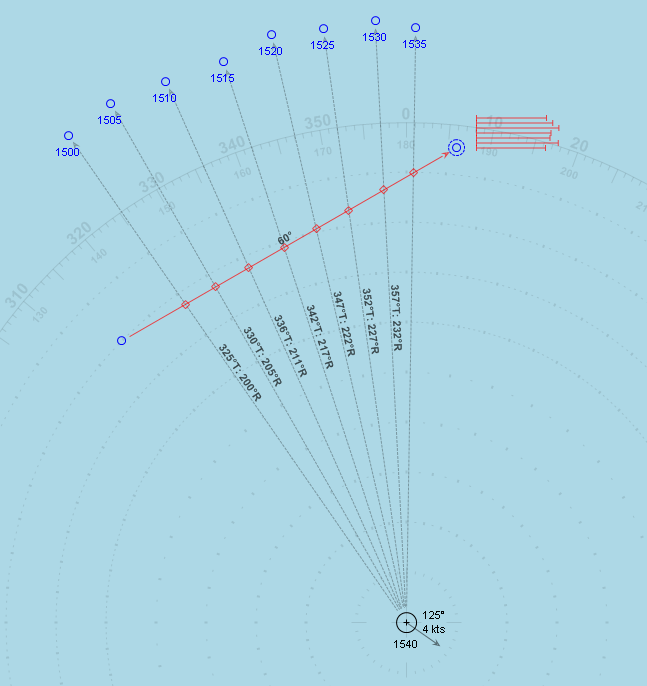 It looks like 60° is a fair solution for direction of relative motion. I'm going to make a guess at a distance of 9000 yds for the last observation at 1535. You'll notice the diamond appears on the 9th ring of the maneuvering board. I replace the TMA line with a contact and solve for the relative speed of 4.5 knots.  This is where the distance assumption can play into the speed determination. You were nice enough to tell me the speed was 7kts so I was able to backsolve for the 9000-8500 yard distance. If you don't ping for distance, or already have an idea of speed (maybe the sonar man says moving slow) then you would have to plot 2 or 3 more predicted bearings and then shoot off in a different direction for a triangulation. Let's just say, that I was able to expertly determine the distance to target at time 1535 to be about 9000 yds. So, I now have my relative motion solution of 60°, 4.5kts. Now I add the contact RM vector to my ownships vector and...  ...I get a true motion solution of 90° and 7.2 knots. So Captain, target bearing True 1°, Rel 236° at 9000 yds, course 90° at 7.2 knots. Probably a good enough solution to score a hit I think. 
__________________

|
|
|
|
07-26-09, 10:24 AM
|
#3 |
|
Helmsman
Join Date: May 2009
Location: Germany
Posts: 102
Downloads: 174
Uploads: 4
|
@Aaron: I've tried your solution. I think it's the best, my attempt using different LOBs with different origins is similar to Dr. Sids. Of course, I didn't notice this before
 . The problem with this approach is: You can get different fitting courses for the contact, at least with human err, I have tried this in my previous post. . The problem with this approach is: You can get different fitting courses for the contact, at least with human err, I have tried this in my previous post.So you MAY have the TRUE course, maybe not, speed and range are then guessed and may, of course, be as faulty. Your approach Aaron, on the other hand, needs a guesstimate of speed (when I don't know the enemy range), which then affects the course (because contact TRUE heading and speed are the result of vector addition). I'm by far no expert in mathematics but I think these are limitations of TMA while moving. When stationary, the course obtained is TRUE (relatively), speed and range must be guessed. I have never used stationary TMA combined with station change and triangulation by predictive LOBs from the first station, but will after I needed five hours (gametime) to track down a merchant yesterday. some pictures to illustrate:  Course of by 30°, still an acceptable TMA  wonderful TMA. still 13° off IMO the problem is where you place your nodes which form the TMA tool. Last edited by XLjedi; 07-29-09 at 10:23 PM. Reason: Changed file host to preserve images for future reference |
|
|
|
07-26-09, 05:57 PM
|
#4 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
Nah, you can do it while moving...
It is possible to predict bearings and triangulate on position which eliminates the guess at distance. If distance is known speed can be calculated. I haven't really played with the TMA tool the way you are though. Have you tried your method using two-legs? ...maybe a 30° course change? You might find that it would improve your distance estimate.
__________________
|
|
|
|
07-29-09, 08:18 PM
|
#5 |
|
Helmsman
Join Date: May 2009
Location: Germany
Posts: 102
Downloads: 174
Uploads: 4
|
two questions:
a) when triangulating while moving: Would I take a map screenshot from my last position I had while moving, make this the mobo center, predict bearings, change course for 20 minutes, then take another bearing, make another screenshot (I marked my previous position with a nice fat x), load that new screenshot into mobo and draw the new bearing? b) would this be the same as a leg change? |
|
|
|
07-29-09, 09:26 PM
|
#6 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,243
Downloads: 53
Uploads: 8
|
I think you could make it a little easier on yourself like this... Let's assume you have the same general TMA track as before. Only this time let's assume the current time is 1520 and the last 3 bearings plotted below are predictions in the future. I've marked the known bearings with diamonds, and circled the predictions. At 1520 I order the sub to cut the engines and hold position, maybe even order a little reverse engines to bring us to a halt faster. Notice my predicted bearing for time 1535 is 1°T:236°R 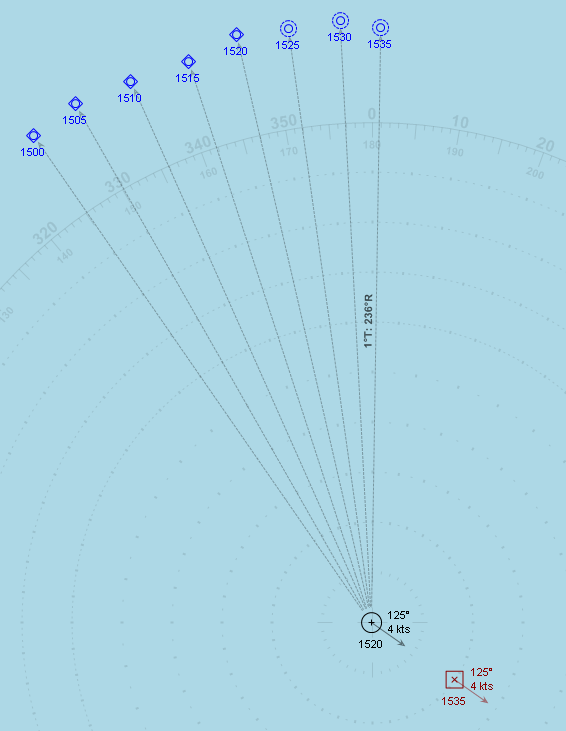 I plotted a contact right on top of my ownship symbol in the center of the MoBo and set the time for the contact as 1520. Then I used the unit advance feature to move the contact ahead to where I would've been at time 1535 had I not remained stationary. Have you used the unit advance feature before? ...it was a tool I added after I wrote the manual and is documented only in the MoBo forum. Anyway, I know the predicted bearing at time 1535 is 1°T so I can plot that on the contact. And now I sit motionless and wait until 1535.  At 1535 the sonar man reports target bearing 247°R. So I plot the bearing from my stationary location (center of MoBo) and can easily triangulate on the 9000yd distance. It's also possible to change your course and move to another location for the second reading. I just think it's easier to conceptualize if I tell you to stop the sub.
__________________
Last edited by XLjedi; 07-29-09 at 10:28 PM. |
|
|
|
|





 Hybrid Mode
Hybrid Mode
