|
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997 |
 10-21-13, 01:17 AM
10-21-13, 01:17 AM
|
#16 |
|
Ace of the deep .

Join Date: Jan 2006
Posts: 9,226
Downloads: 901
Uploads: 73
|
What is the documentation folder ? Is it part of the mod ?
|

|

|
|
10-21-13, 03:16 AM
|
#17 |
|
Captain
 Join Date: Sep 2013
Posts: 542
Downloads: 70
Uploads: 0
|
http://www.subsim.com/radioroom/show...ostcount=10832
I just reproduced this .. and this is deffinately a bug in NewUI's code. How confident are you in your solution ? Are you not skipping multiple checks on range this way ? |
|
|
|
|
10-21-13, 03:42 AM
|
#18 | ||
|
Navy Seal
 Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
 Quote:
|
||
|
|
|
|
10-21-13, 06:05 AM
|
#19 | ||
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
 http://www.uboatarchive.net/U-111INT.htm Quote:

|
||
|
|
|
|
10-21-13, 08:55 AM
|
#20 | |
|
Watch
 Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Quote:
|
|
|
|
|
|
10-21-13, 10:50 PM
|
#21 |
|
Watch
Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Alright, some theory crafting regarding hydrophone range and bearing accuracy based on different sources. Thank you, gap, for pointing me to them.
[1] http://www.cdvandt.org/GHG1996.pdf [2] http://de.wikipedia.org/wiki/Gruppenhorchger%C3%A4t [3] http://www.sengpielaudio.com/calculator-spl.htm [4] http://www.sengpielaudio.com/calculator-levelchange.htm [5] http://www.forum-marinearchiv.de/smf...?topic=4469.15 The following calculations are based on very little data and lots of assumptions and last but not least, I'm not sure whether I have applied the maths involved correctly. I'll assume a GHG (group listening apparatus) hydrophone and a merchant at 12-13 knots as target contact, since [1] provides some data on this scenario, and this is a common encounter in sh5. First: max range under optimal conditions, that is:
[2] says: 20km for single contacts I'll go with something in the middle, which, as far as i know, happens to be the max range the game starts to make contact pickups by hydrophone possible: At R = 30km under optimal conditions, we can barely hear the contact. At 90 (or 270) degrees the sound hits the hydrophones perpendicularily, i.e. the full sound pressure stimulates the hydrohpone membranes. If we deviate from that bearing, the sound waves come in aslant, and only a portion of the sound pressure is effective on the hydrophone. That portion is proportional to the cosine of the deviation from 90/270 degrees: maxrange = R * cos(alpha), with alpha = deviation from 90/270 degrees On to bearing accuracy: The GHG features 4 settings for the high pass filter[1]:
[1] says: the merchant at 12-13 knots produces a maximum sonic spectrum at 100Hz, and only 10% at 4Khz, which we can hear using the 3Khz setting. Fortunately, filtering out 90% of a sound does not mean, that the sound pressure usable at the hydrophone drops by 90%. [3] has some explanations and calculators about this topic. I assume, the sounds at different frequencies produced by the engines are equally loud. If we add up 10 equally loud sound sources with different fequencies, the sound level increases by 10dB. Conversely, the sound level of those 10% at 4kHz is 10dB less than the sound level of the whole, unfiltered sound. This level change is called "Delta L". The formula is not quite as simple as it looks like from this particular example (see [3], Adding levels of equal loud sound sources). What does a 10dB decrease of the sound level mean regarding the usable sound pressure at the hydrophones? According to [4], the sound pressure factor y = 10^(Delta L / 20): For -10dB, this is around 0.316. Sound pressure is reciprocally proportinal to distance. So, at a bearing of 90 degrees, under optimal conditions, we can barely hear our contact at 30km and determine its bearing +-4 degrees. If we wanted to use the 3KHz setting and determine its bearing +-0.75 degrees, we need to be closer than 30km * 0.316 = 9.48km. Time for some more assumptions regarding the other hydrophone high pass filter settings, that are not covered by [1]: Given that 10% are above 4kHz, let's assume 33% (i.e. one third) of the sound emissions of a merchant at 12-13 knots are above 1Khz, and 3% (i.e. 1/33rd) are above 6kHz. This leads to the following sound pressure factors: Code:
cutoff-frequency None 1kHz 3kHz 6kHz Portion of the sound 100% 33% 10% 3% Decrease of sound level 0dB -4.77dB -10dB -15.18dB Sound pressure factor 1 0.577 0.316 0.174 bearing accuracy +-4 +-2 +-0.75 +-0.5 We have four functions, one for each high pass filter setting. The x-axis is the bearing deviation from 90/270 degrees. The y-axis shows the maximum range in km at which we can hear the contact using a specific high pass filter setting. Code:
Blue(off) : f(alpha) = 30km * 1 * cos(alpha) Red(1kHz) : f(alpha) = 30km * 0.577 * cos(alpha) Green(3kHz): f(alpha) = 30km * 0.316 * cos(alpha) Gray(6kHz) : f(alpha) = 30km * 0.174 * cos(alpha) 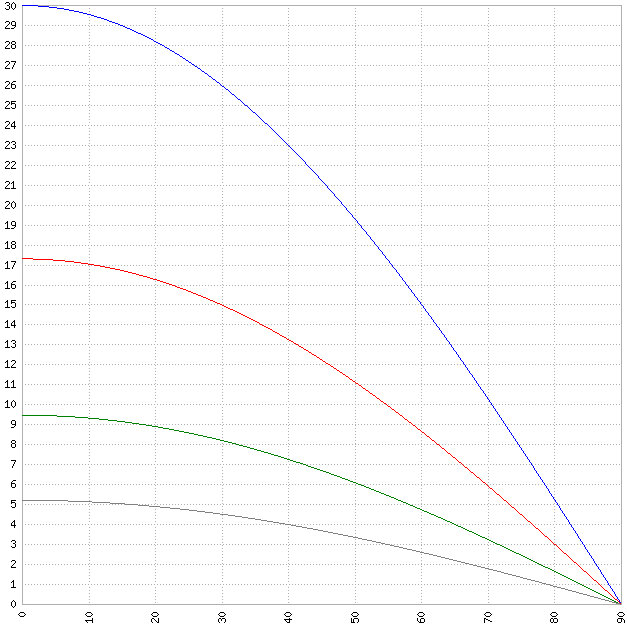 These results correspond to [5], which (I think) cites from E.Rössler, Die Sonaranlagen der deutschen U-Boote. In a GHG-Test performed in February 1943, the type IX sub U-194 was not able to detect a contact in a distance of 4km on a bearing between 348 and 10 degrees. This test report also has some data on the GHG range while the sub is moving at different speeds. Feedback is very welcome. Maybe I should have used sound intensity instead of sound pressure? Maybe assumptions are just plain wrong? Otherwise I'm planning to base the mod on this model. Last edited by tscharlii; 10-21-13 at 11:18 PM. |
|
|
|
|
10-22-13, 02:38 AM
|
#22 | |
|
Captain
Join Date: Sep 2013
Posts: 542
Downloads: 70
Uploads: 0
|
Quote:
I cant comment on the rest, tho it sounds very cool! |
|
|
|
|
|
10-22-13, 04:41 AM
|
#23 | |||
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
tscharlii,
your graph, the calculations it is based on, and the few arbitrary assumptions you had to make, look perfectly plausible. I have just a little amendment regarding SH5's "physical world horizon": IIRC, it is in a radius of ca. 40km from the player, not 30 as you are assuming. But this little mistake doesn't invalidate the rest of your reasoning. I wish to point you now to some of the parameters affecting hydrophone's efficiency in stock game. This is to make sure that you will take them into the due account; should you be already aware about the information below, please ignore it. Configurable global parameters (data\Cfg\Sensors.cfg). They affect all the player's hydrophones (AI units' sensor parameters are found in data\Cfg\Sim.cfg, and are much more simplified): Quote:
Individual hydrophone parameters (SensorData controller). They affect individually each player hydrophone or any other sensor which can be fitted aboard playable u-boats (another controller, obj_Sensor, is used for AI sensor, and as before its parameters are much more simplified): Quote:
- inability to customize global parameters for each sensor. - inability to customize sensors' accuracy (we should explore the SweepArc parameter though) - inability to set different detection ranges and/or detection probabilities as a function of sensor's and targets' altitude/depth and of target's bearing. TheBeast and XRundel have deviced a brilliant method to partially obviate some of the above limits: for their Repaired Equipment Mod, they have used more than one SensorData controller for each hydrophone, each set with different sensor depths and max detection ranges. This workaround is not exempt from flaws though: each controller must be placed in a precise order for the hydrophone not getting mute for the player below a certain depth; I and Volodya discovered it a while ago. Yet, after our fix the human player is not affected by detection range limits at varying depths, and he can always listen as far as the maximum set MaxRange. Moreover, detection ranges for the AI operator don't vary following a curve, but they "jump" from a level to the next one. A smooth depth/range curve could be simulated by using many conveniently set SensorData controllers, but I am afraid tha doing it could determine lagging or even worst problem. This is really all for now. Keep up your brillian work Quote:

|
|||
|
|
|
|
10-22-13, 07:15 AM
|
#24 | ||
|
Watch
Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Quote:
Quote:
What's the best way to have a look at the contents of this file? When I try to open it using the GoblinEditorApp.exe it just gives me a lot of "Lost Controllers" entries. That can't be right. Currently I'm looking at it using a hex editor. |
||
|
|
|
|
10-22-13, 07:28 AM
|
#25 |
|
Watch
Join Date: Dec 2011
Posts: 26
Downloads: 17
Uploads: 0
|
Ahh, n/m, I think I figured it out. Load UBoot_Sensors.GR2, Merge UBoot_Sensors.sim, and then:
Project Tree: SensorData @ GHG9 -> Existing Behaviours -> Render -> SensorData |
|
|
|
|
10-22-13, 07:38 AM
|
#26 | ||
|
Navy Seal
Join Date: Jan 2011
Location: CJ8937
Posts: 8,214
Downloads: 793
Uploads: 10
|
Quote:
Obi-Wan Kenobi  Quote:
|
||
|
|
|
|
10-22-13, 08:50 AM
|
#27 |
|
Navy Seal
Join Date: May 2010
Location: Србија
Posts: 6,078
Downloads: 581
Uploads: 13




|
I'm reading this thread and it looks like this is going to be one very god mod.
Please, keep up the good work, with any language included, German, English, Or Japanese if you like...  Anyone with scripting knowledge is precious for subsim ...Don't get surprised if I make few mod requests for you ,after you finished with realistic hydrophones...
__________________
Best regards... Vecko  The Wolves of Steel v2.2.25_SH5 Expansion Pack_Full The Wolves of Steel v2.2.xx to v2.2.25 - Update  PDF Install Instructions How to report an issue  If You wish to support my work... |
|
|
|
|
10-23-13, 01:54 PM
|
#28 |
|
XO
 Join Date: May 2008
Location: oslo,Norway
Posts: 424
Downloads: 254
Uploads: 0
|
Thx for the great Mod. I use Sobers list and I have a small issue. I get updates, but I never got sweeping around target area. The test object was very close(a german destroyer) and I couldn t lock on to it either with hydrophone follow selected target either so something is messing. when you say TDW s hyd fix you mean the patch right?
hmmm "Hydrophone follow nearest contact" supposed to be TDW s. I don t see it exactly like that anywhere what am I missing here? |
|
|
|
|
10-23-13, 02:49 PM
|
#29 | |
|
Captain
Join Date: Sep 2013
Posts: 542
Downloads: 70
Uploads: 0
|
Quote:
|
|
|
|
|
|
10-23-13, 03:02 PM
|
#30 | |
|
XO
Join Date: May 2008
Location: oslo,Norway
Posts: 424
Downloads: 254
Uploads: 0
|
Quote:
 hey! what happened to my face lol well now hydrophone follow selected target works but it still sweeps 360 degrees. Last edited by Husksubsky; 10-23-13 at 05:35 PM. |
|
|
|
|
 |
|
|





 Linear Mode
Linear Mode

