|
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997
|
SUBSIM: The Web's #1 resource for all submarine & naval simulations since 1997 |
 11-08-07, 09:32 AM
11-08-07, 09:32 AM
|
#16 | |
|
The Old Man
 Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Quote:
|
|

|
|
11-08-07, 09:41 AM
|
#17 | |
|
Ace of the Deep
 Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
Quote:
The only issue in that case has to do with estimating target speed/distance. ...and that's where I begin talking about either a) making an educated guess about speed, or b) predicting future bearings and taking a new observation on a different leg to triangulate the target location.
__________________

|
|
|
|
|
11-08-07, 09:52 AM
|
#18 | ||
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Quote:
|
||
|
|
|
11-08-07, 10:03 AM
|
#19 | |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
Quote:
Plotting position of Ownship is certainly no problem. I've been thinking about adding a new feature called "waypoints" that would allow plotted positions to be specifically associated with OwnShip or a Contact. I can see how a group of waypoints would be useful as inputs for your formula. I think adding a TMA feature for DRT position/bearing plots would make a great addition! I'm excited about the possibilities here...
__________________
|
|
|
|
|
11-08-07, 10:36 AM
|
#20 |
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Now I'm thinking about
1) detecting when the solution is bad. Now this can be easily done after the solution by detection how it fits the LOBs. In some rare cases it can also be detected from inputs (Ownship course with no legs) and in one very very race case it can be detected inside the formula (determinant=0). 2) Adding more limits, especially speed or distance. That would allow to get solution even when you don't have leg. But at the first glance it means to combine this matrix with quadratic solution .. currently I have no idea how to do it. To set Vx and Vy to certain values would be simple, but to add vx*vx+vy*vy=certain value is a problem. Anyway this could be easily solved numerically, by simply trying more possible courses and returning solution with best error. It's similar with distance. |
|
|
|
11-08-07, 11:19 AM
|
#21 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
I could probably add some post-processing error checks to invalidate obviously wrong solutions, or maybe even plot a different color or color range for solution confidence, perhaps based on the r^2 result from your line fit? I could blend red and green for instance...
If it were me, I probably wouldn't want to muddle up a nice clean math engine with any sort of AI error detection.
__________________
|
|
|
|
11-08-07, 11:28 AM
|
#22 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
Is it true then to say that this method works with any of the following:
a) two legs b) one leg and a speed input c) one leg and a distance input ...and are we making an assumption that the position/bearing plots have to be at equal time intervals? Or did you say that obs time could be variable but would need to be input for each position/bearing plot?
__________________
|
|
|
|
11-08-07, 11:34 AM
|
#23 |
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
In my implementation any times. It can even be more LOBs from same time. Hm .. I should better try this :rotfl:
Edit: tried .. and it works like charm. At each time there are 2 LOBs now. Now this can be used to limit target distance. You simply add 1 fake LOB to cross the actual LOB at the point of correct distance. Speed does not seem to be so easy anyway. 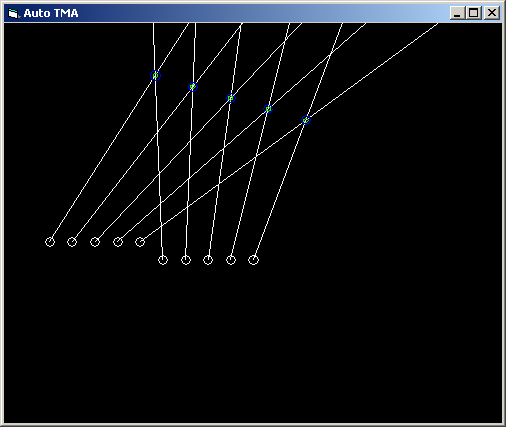
|
|
|
|
11-08-07, 11:40 AM
|
#24 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
...and I guess we're assuming Ownship maintains a constant speed while collecting the LOBs.
Does the code accept "n" LOB inputs or is it presently hardcoded to accept a specific size matrix?
__________________
|
|
|
|
11-08-07, 11:57 AM
|
#25 |
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Ownship maintain same speed in this demo only. It does not have to. It does not have to go straight. It can do anything. Well in fact moving straight at constant speed is the only situation when this does not work
 It can go in circles. It can use other platform's LOB to limit the solution, there are many many uses. Only the solution is limited to constant speed and bearing. Or let's better say, it finds constant speed and heading which matches the LOBs best. There can be ANY number of LOBs. Well more than two. Matrix is always 4x4. You only have to sum more data while creating the matrix, so the time of the computation depends in linear way on count of the LOBs, which is great. Most least square method applications results in this time requirements. |
|
|
|
11-08-07, 12:29 PM
|
#26 |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
What are you using as your programming platform? That window icon suggest maybe an older edition of VB or C...
I use the latest Visual Studio suite and favor VB 2005 (aka VB.net) Express edition (WooHOO! FREE Download!  ) )
__________________
|
|
|
|
11-08-07, 12:34 PM
|
#27 | |
|
Ace of the Deep
Join Date: Jun 2005
Location: Palm Beach, Florida
Posts: 1,200
Downloads: 53
Uploads: 8
|
Quote:
 So it's position/bearing input only. Now the only question is... Should I continue bothering with this 1.1 beta or just focus my attention on jumping ahead to 2.0? :hmm:
__________________
|
|
|
|
|
11-08-07, 12:39 PM
|
#28 |
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Well that's yours to decide. I'll guess I'll improve the formulas a bit and I offer any support to put them into your software.
I use old VB beacuse I use at my job, I know it well and it works well in these simple cases. It also has magically small executables and it's runtime is included in all windows installation for few years now. Anyway in most languages the code should work with more or less copying it as it is, it's really that simple. Last edited by Dr.Sid; 11-08-07 at 12:58 PM. |
|
|
|
11-08-07, 12:59 PM
|
#29 |
|
Silent Hunter
 Join Date: Jun 2004
Location: Along the Watchtower
Posts: 3,810
Downloads: 27
Uploads: 5
|
This is pretty cool. Now, if you can only convince SCS to use it to replace their Truth-based method of aTMA...
__________________

|
|
|
|
11-08-07, 01:07 PM
|
#30 |
|
The Old Man
Join Date: May 2005
Location: Czech Republic
Posts: 1,458
Downloads: 6
Uploads: 0
|
Well convince them to make any new game in the first place :rotfl:
|
|
|
| Thread Tools | |
| Display Modes | |
|
|





 Linear Mode
Linear Mode

