Silent Hunter 
Join Date: Sep 2010
Posts: 3,975
Downloads: 153
Uploads: 11
|

Since I'm finishing up my work on ISP 2.0, I'll give some peeks inside the physics of the game.
The most complicated issue of the subs is the diving. In version 1.1 I tried to get fast diving, in line with published times I've read. In retrospect, I consider this a mistake. Dive angles were very large, and almost certainly, unrealistic. To correct the matter, I've completely redone the diving. Before, diving times took priority over diving angles, whereas now, diving angles take priority over times.
I doubt that any SH4 game can ever have fully realistic diving, and I think I've identified the main, or one of the main reasons for this.
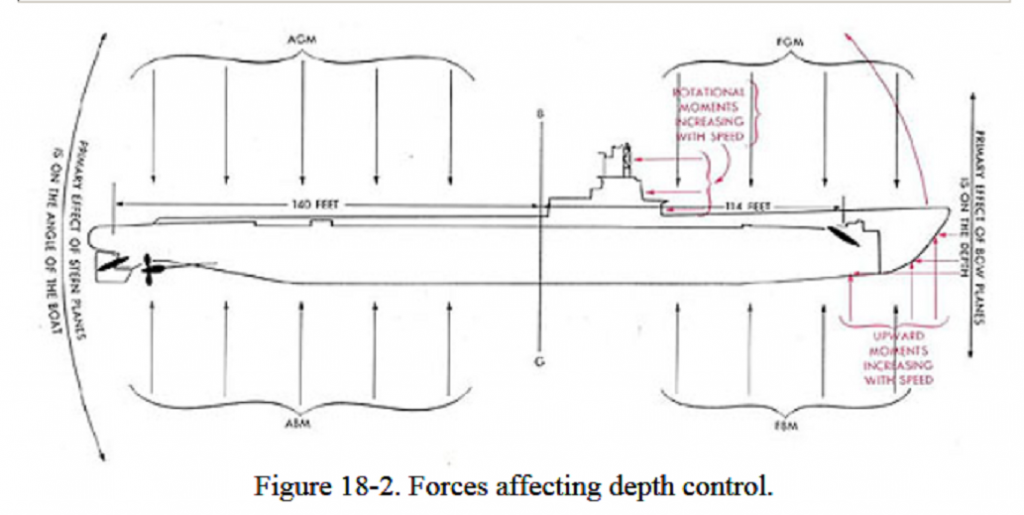
Below is a diagram from a USN training manual showing how the dive planes are supposed to work:
Quote:
The location of the planes is shown in Figure 18-2. (The dimensions shown are approximate, and apply only to the submarine described herein.) As indicated, the bow planes tend to change the vertical position of the submarine on an even keel. There is a certain rotational moment, but it is counteracted to a great extent by the longer after body which acts somewhat as a stabilizing rudder, resisting angular displacement.
The stern planes are located at a greater distance from the center of buoyancy and, although they are smaller in area, their effect is much greater than that of the bow planes. Their effectiveness is increased by their location directly aft of the propellers. This combination of a long moment arm and location in the propeller wash results in a rotational movement. Thus the bow planes are normally used to control the depth, and the stern planes the angle of the ship.
|
Alas, the game doesn't work this way. Fwd and aft planes seem to have about equal effect on the angle, the change in depth seems almost independent of the operation of the planes. This is especially true, when we remember that we can order a dive when motionless, and the sub will go up or down, and then hover when it reaches a certain depth. Speed and dive angle allow for rapid change in depth, but after the boat levels out (about 10 to 20 ft. before reaching ordered depth), rate of ascent/descent becomes very, very slow.
I've tried many different schemes in trying to fix, or work around the problem. In the game, all the boats have a gravity center, CG, in the middle of their length. I tried moving it forward substantially. [It isn't shown in the above diagram where it should be, but appears somewhere forward of the middle.] This should permit the fwd planes to have more effect on the depth, and less on the angle. Unfortunately, setting the CG forward gives the boats an upward angle, and worse, causes them to reach an equilibrium at a shallower depth. Moving the CG backward gives the boat a downward trim angle, and causes it to go deeper. The angle is the opposite of what one would expect, and seems to indicate a mistake in the coding/model somewhere.
I tried setting the CG forward, and using a slightly increased mass, to make to boat reach an equilibrium at the correct depth. This idea seemed promising, but when I tested it, the boat took even longer than normal to make the last 10 ft. of descent.
Next post, I'll explain what I finally settled on, for the diving scheme.
|